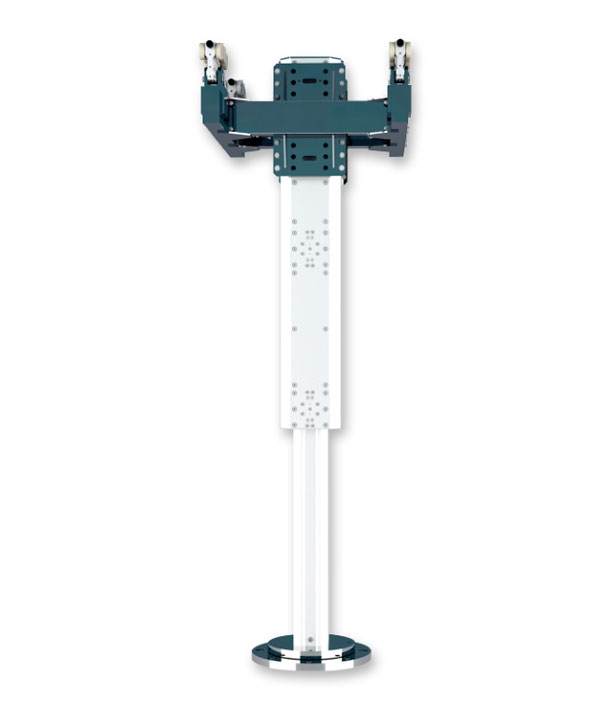
由于具有无重力化、准确直观、操作便捷等特点,“平衡吊”广泛应用于现代工业中的物料移载、高频率搬运、准确定位、部件装配等场合。助力T型机械手一种模仿人手动作,又无人操作的自动操作装置。助力机械手包括手部、腕部、臂部、立柱和行走机构等组成:
1.手部:是夹持工件的构件。助力机械手由手爪和夹紧装置两部分组成。手爪有夹紧和松开动作。夹持式手爪的形式与人的手指相仿。另外还有真空和电磁吸盘(相当于手爪),用来吸取表面光滑的零件或薄板。有的手爪还可夹持一些专用工具,如喷枪、扳手、焊接工具等。
2.臂部:是支撑手部、腕部的构件。机械手的臀部是为取代人的手臂而研究设计的,但它却达不到人臂的灵巧和适应功能。因此,只有把结构简化,把运动轨迹分为沿三坐标轴线方向往复移动和绕三坐标轴线进行回转。一般手臂又有前后伸缩、左右回转、上下升降或上下摆动等几个运动。根据需要可选其中一个、二个或三个运动。
3.腕部:是连接手部和臂部的构件,起支撑手部的作用。它可以有俯仰、左右摆动和回转三个运动。特殊情况可以增加一个横向移动。有的机械手没有手腕动作。
4.立柱:是支撑手臂等构件的。一般助力机械手的立柱为固定不动的,也有的因工作需要立柱作横向移孔。此种称可移动式立柱。
5.行走机构:在助力机械手要求完成较远距离的操作时,可增加滚轮机构。